
Develop Platoon Centered Control (PCC) for CAV Platooning
CAV technology can provide great opportunities to address urban and highway traffic issues. CAV platooning has been considered one of the most important techniques to coordinate CAV driving to improve safety, relieve traffic congestion, and reduce energy consumption. Specifically, CAV platooning groups and drives a fleet of CAVs together through cooperative acceleration and longitudinal speed control. While existing research is based on controlling individual vehicles using adaptive cruise control (ACC) and cooperative adaptive cruise control (CACC) techniques, the AI+CASE Lab has designed an innovative Platoon Centered Control (PCC) approach for CAV platooning.
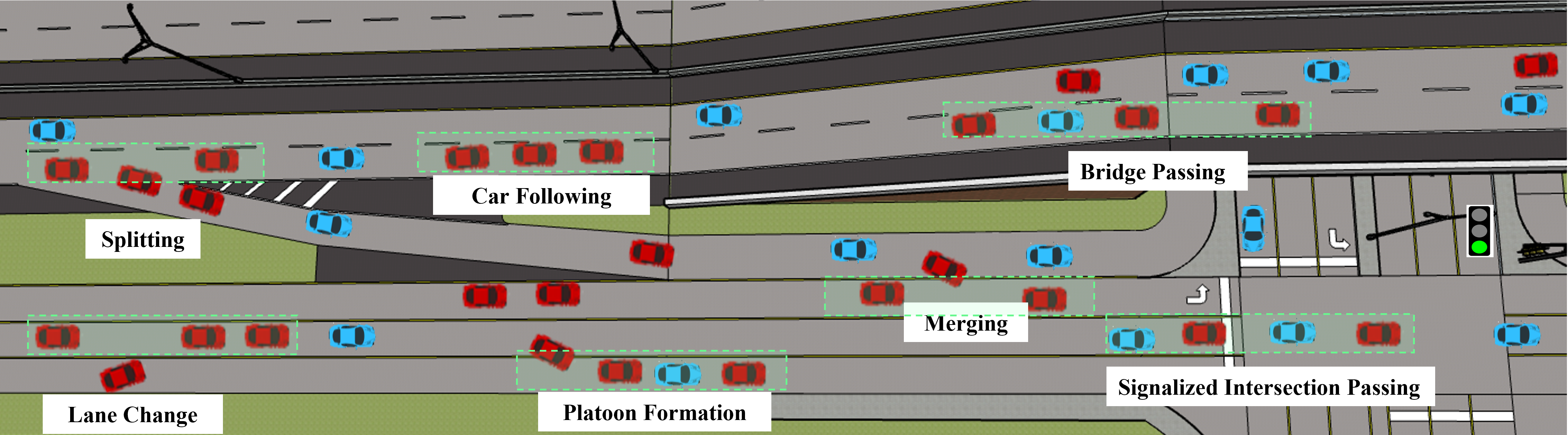
Figure 1. Platoon Centered Control in different driving scenarios.
The PCC approach considers the platoon as a system and uses control technology to coordinate individual CAVs’ maneuvers toward a better platoon-wide system performance. An interesting challenge with the PCC approach is that it often gives rise to complicated, large-scale optimal control or optimization problems that require extensive computation. To successfully implement the PCC approaches, the team has been dedicated to developing a comprehensive framework shown in Figure 2, that integrates control theory, optimization theory, distributed algorithms, and machine learning approaches to address various driving scenarios (Figure 2) such as car-following, lane-change, merging and splitting, eco-intersection passing, and broader interactions between PCC and other road infrastructure.
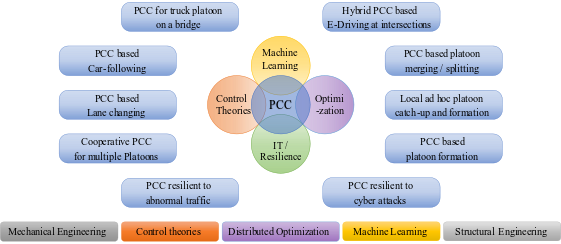
Figure 2. Methodologies for Platoon-Centered Control.
Funding sources: NSF CMMI 1436786 award; NSF CMMI 1901994 award; Toyota Miscellaneous Donors; FMRI Y6 project; First Nayar Prize at IIT.