Research
In the Human Neuromechanics Laboratory, we study how the nervous system and the musculoskeletal system interact during human locomotion. We use tools from neurophysiology, biomechanics, and engineering to identify general strategies humans use to control gait in health and disability. The long term goal is to create better robotic devices for assisting with human movement.
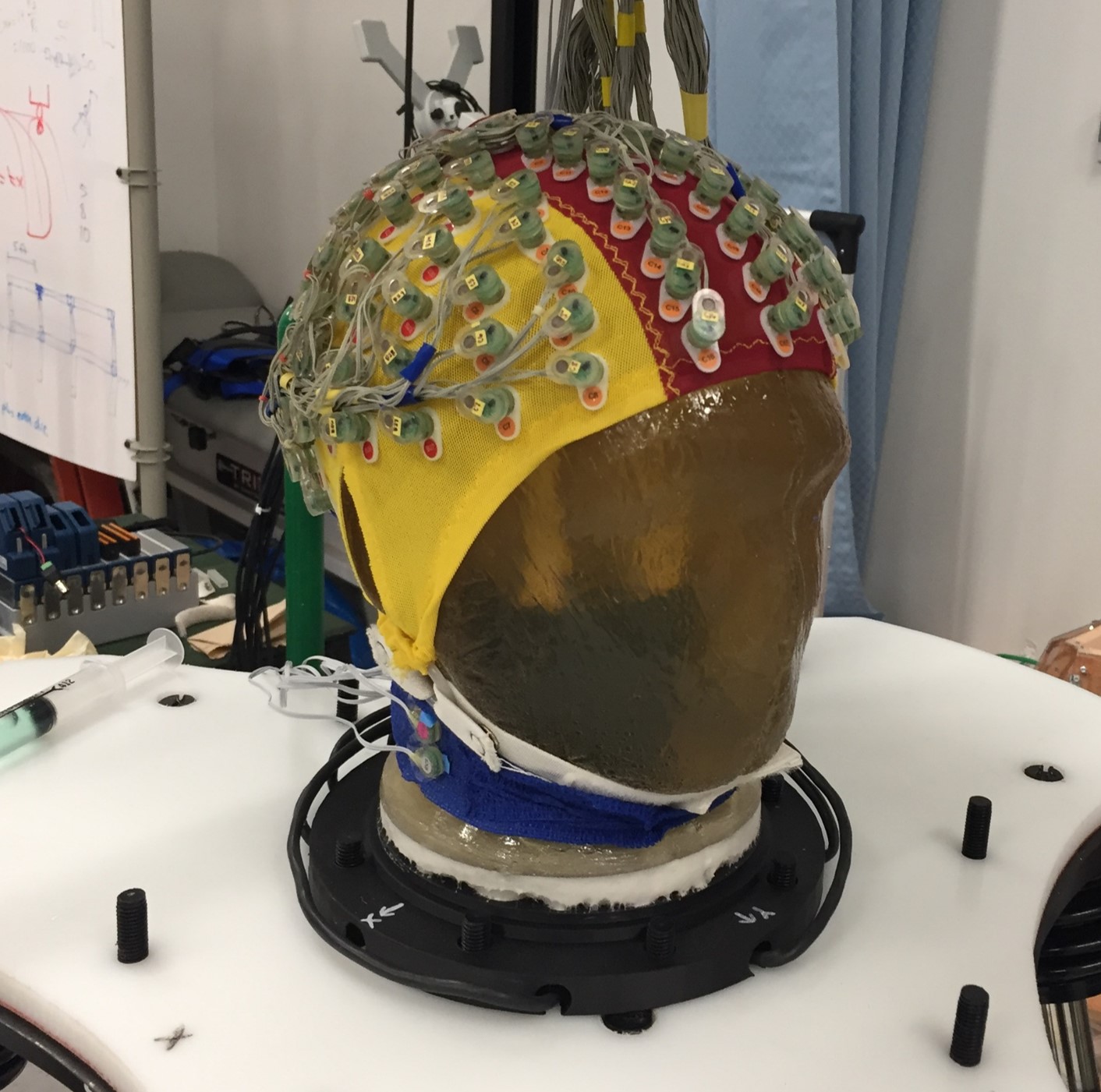
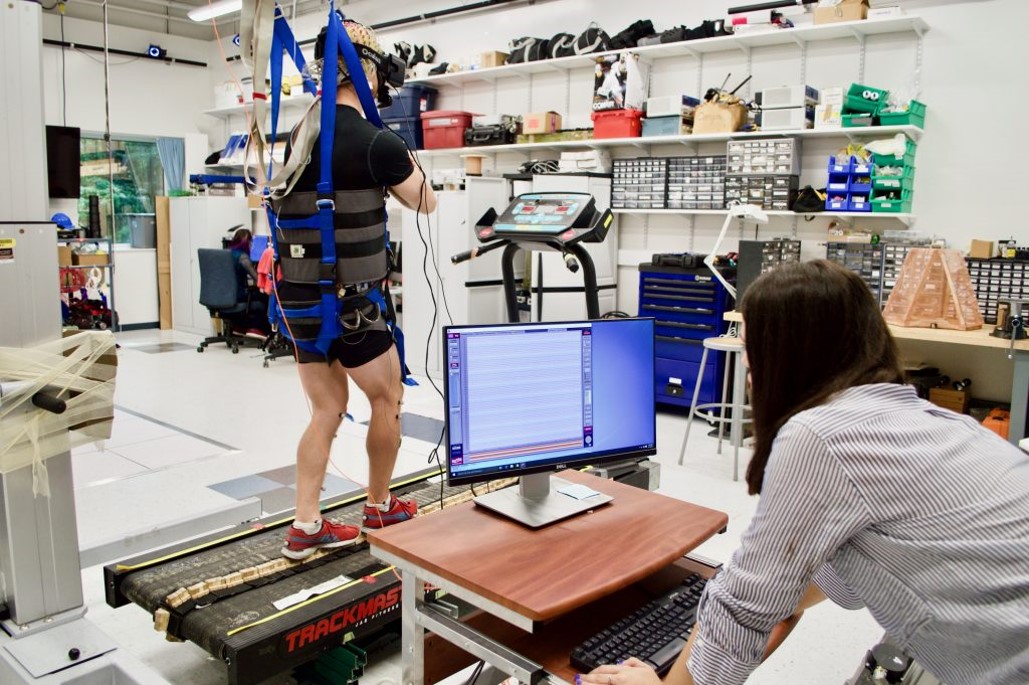
Electroencephalography

To provide insight into brain activity during walking and running, we use high-density electroencephalography. Traditional means of recording brain activity, such as fMRI, PET, and MEG, have limitations in that the subject must remain motionless or can only provide brain activity averaged over a long duration. Over the last ten years, we have pioneered the use of high-density electroencephalography (EEG) to study brain activity patterns in freely moving human subjects. In particular, we have had to devise novel software algorithms and hardware modifications to reduce motion artifacts that appear in the EEG recordings. The advanced technology allows us to study brain function in laboratory and real-world settings. (Research Post)
Robotic Lower Extremity Exoskeletons

In our lab, we focus on building simple lower limb exoskeletons to provide insight into human locomotor physiology and to be used as possible motor training aids after neurological injury. Testing human locomotor physiology gives us new insight into the biomechanics, neural control, and/or energetic cost of human movement. Additionally, using lower extremity exoskeletons for motor training can help rehabilitate individuals with spinal cord injury, stroke, or other neurological disabilities. Our goal is for the individual to use the exoskeleton during training to improve performance without the exoskeleton. Our lower extremity exoskeletons are controlled by proportional myoelectric control. This control scheme takes the electromyography signal from a biological muscle and uses it to activate a synergistic artificial actuator to increase robotic assistance in proportion to the biological muscle activation. This method provides a direct link between the user’s nervous system and the exoskeleton torque. It is possible lower extremity exoskeletons interfaced with the nervous system could improve muscle coordination by enhancing motor adaptation within the impaired nervous system.

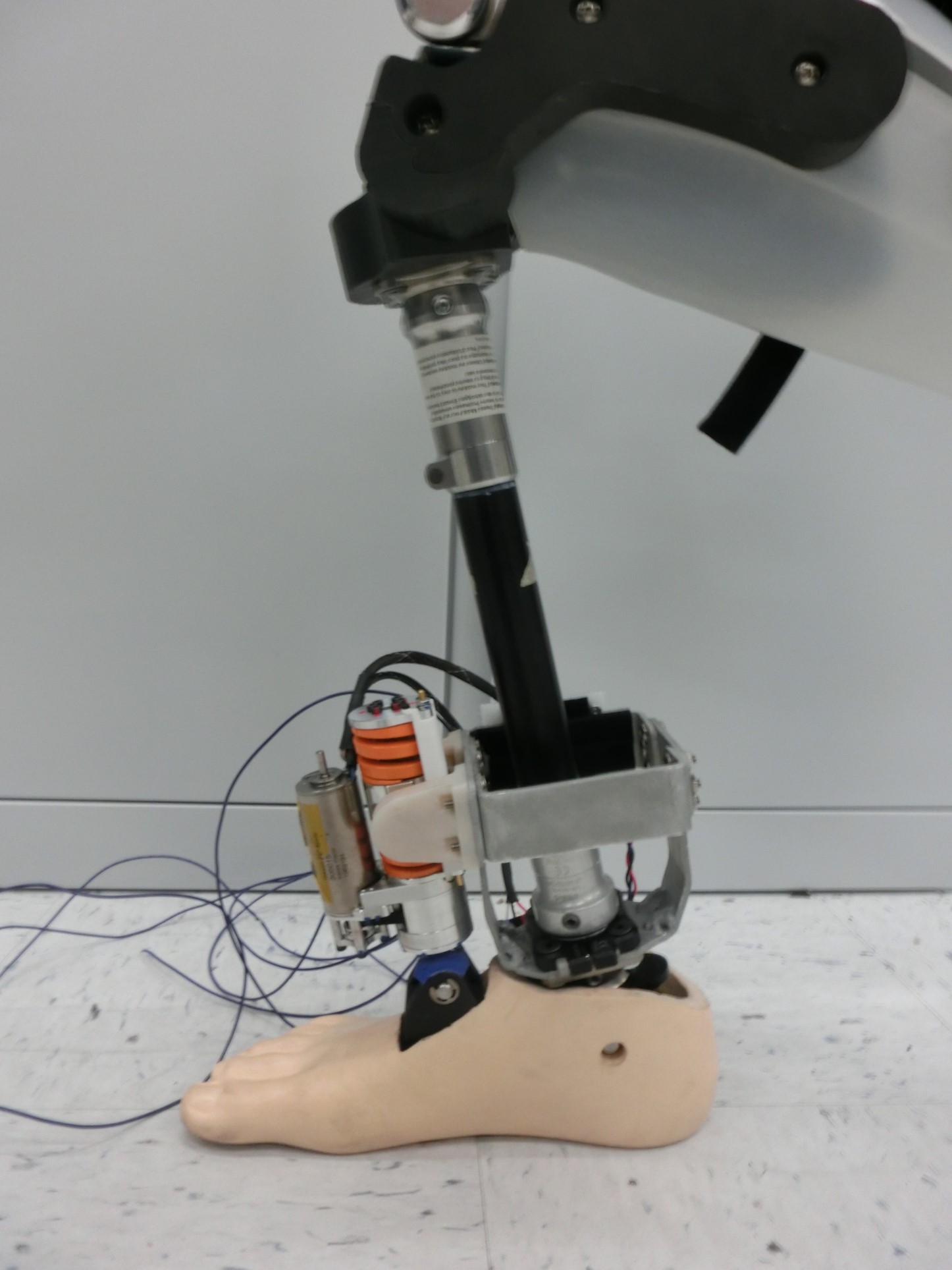
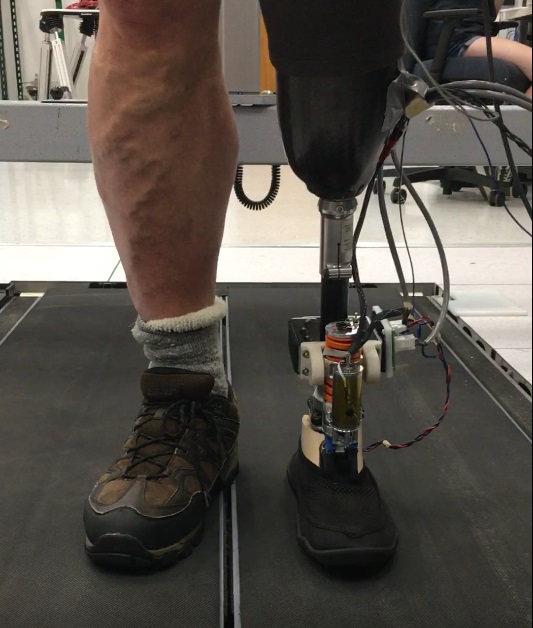
Bionic Lower limB Prostheses
We develop and test novel bionic prostheses to better help individuals with lower limb amputations. These bionic prostheses use pneumatic artificial muscles and proportional myoelectric control to vary ankle mechanics during walking. Clinically available powered lower limb prostheses typically rely on intrinsic sensing of kinetics and kinematics (e.g., heel and toe contact, ankle angle, ankle torque) to determine when to transition between gait phases during walking. These prostheses work well on level ground, but they are limited when adapting to different terrain. We therefore aim to develop a lower limb prosthesis that utilizes the amputees neuromuscular system to power the prosthesis. This provides the amputee with greater control over their prosthetic by allowing them to actively change their prosthetic in real time.