
Research Thrusts
Students will engage in research topics matched to their abilities and their interests in the eleven research thrusts described below:.
Thrust 1: Deep Learning for Autonomous Network of Air and Ground Agents
Faculty leads: Dixon, Shea, Wang, Du
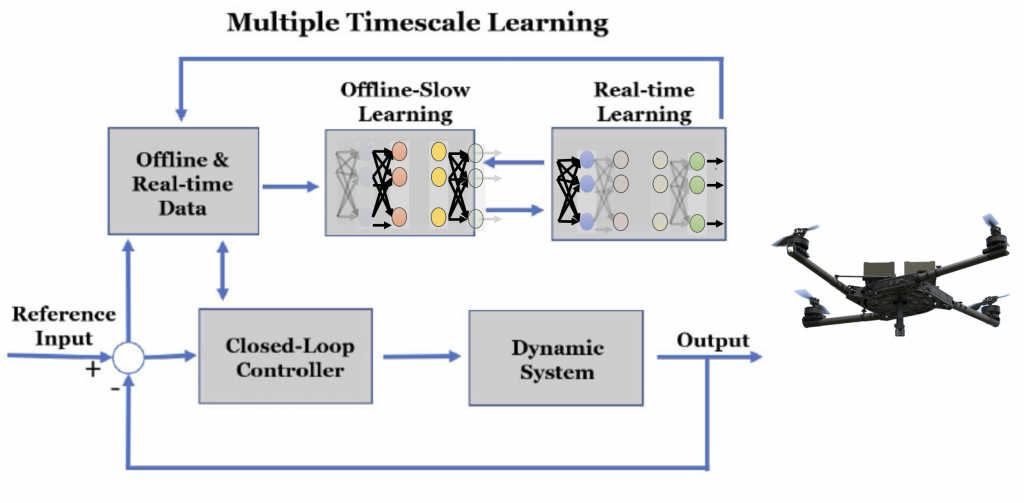
Students will contribute to the development and application of real-time and multiple-timescale deep learning, which offer new paths to autonomous operation in complex environments. Typically, deep learning methods require extensive pre-training to determine the weights of the deep neural network (DNN), which are then held constant, resulting in no learning from the real environment during real-time execution. Recent breakthroughs by mentor Dixon provide real-time and multiple-timescale learning by DNNs with a Lyapunov-based stability guarantee.
Research is ongoing to:
- Assess the sensitivity to noise in a real operating environment (e.g, GPS feedback from an autonomous agent working in an outdoor environment)
- Assess robustness to intermittent feedback, such as intermittent wireless communication
- Develop techniques to translate learning by an agent to other heterogeneous agents in the network
- Develop and analyze shared learning across heterogeneous systems
Site participants will develop software for learning and control of a diverse set of autonomous vehicles and robots, and will test and evaluate the performance of different real-time learning approaches in a variety of operational scenarios.
Related federal projects: AFOSR Center of Excellence on Assured Autonomy in Contested Environments, AFOSR DURIP, AFRL FA8651-21-F1025: “Multi-Agent Learning and Autonomy”, ONR N000142112481: “Event Driven Online Optimal Control of Autonomous Systems for MCM Missions”
Thrust 2: Robust 5G Communication for Autonomous Systems
Faculty leads: Shea, Butler
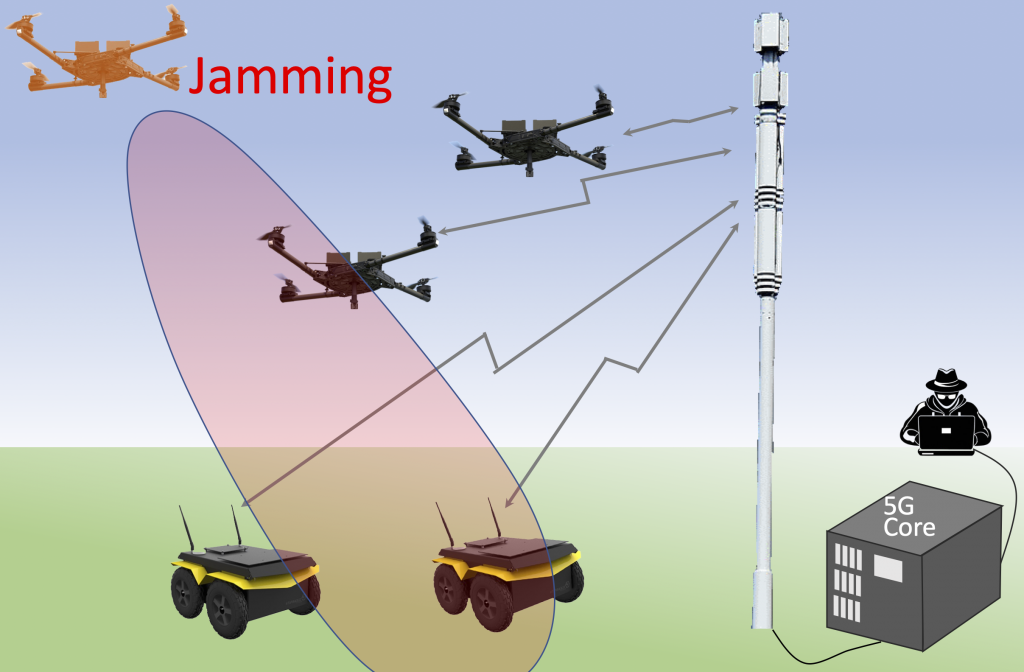
Students will conduct research on assessing and remedying the vulnerabilities of fifth-generation cellular communications (5G) used for coordination and control of autonomous systems. 5G offers the potential to significantly improve the performance of autonomous systems by offering extremely low latency, high data rates, and reliable communication in typical cellular communication conditions. This last condition, which is based on carefully coordinated spectrum use by cellular carriers under the purview of the FCC, may not exist in many applications where autonomous systems may be most useful, such as remote surveying, disaster relief, and military missions.
UF is planning to install a Private 5G/CBRS base station at the UF Autonomy Park by the end of 2024. REU participants working on this project will aid in assessing the vulnerability of this system to both physical-layer (jamming) attacks and to higher-layer attacks aimed at the core network, as well as developing approaches to make the system robust against such attacks.
Related federal projects: AFOSR Center of Excellence on Assured Autonomy in Contested Environments; DHS 70RSAT20CB0000017, “Deploying Defenses for Cellular Networks Using the AWARE Testbed”; NSF CNS-2059411, “Collaborative Research: SaTC: CORE: Medium: Enabling Practically Secure Cellular Infrastructure”
Thrust 3: Game-theoretic Synthesis of a Symbiotic Cyber-Physical System
Faculty lead: Fu
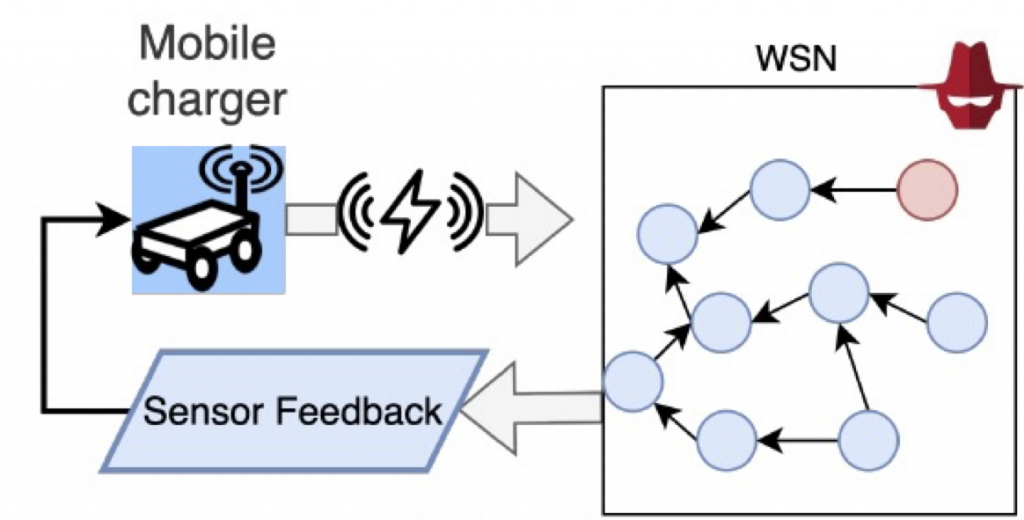
Students will conduct research on defending cyber-physical systems (CPSs) from attack. Sensor attacks can be employed to inflict physical damage to CPSs. In particular, limited sensor batteries in a wireless sensor network (WSN) make them vulnerable to energy exhausting attacks, which result in loss of communication and control functionality.
We are developing a “symbiotic” CPS defender that consists of an autonomous robot and a WSN, where the WSN provides critical task-relevant feedback information to the robot, and the robot not only carries out its high-level mission but also serves as a mobile charger to maintain the operation of a WSN under attacks. REU students working on this project will create simulations in Gazebo as a virtual proving ground before performing experimental evaluation in the UF Autonomy Park. Students will deploy jammers to implement energy exhausting attacks and program basic motion primitives for the mobile robot charger to charge the sensors.
Related federal project: NSF CAREER: “Formal Synthesis for Provably Correct Cyber-Physical Defense with Asymmetric Information”
Thrust 4: Human-Swarm Interactions with Advanced XAI Techniques in Dynamic Environments
Faculty lead: Du
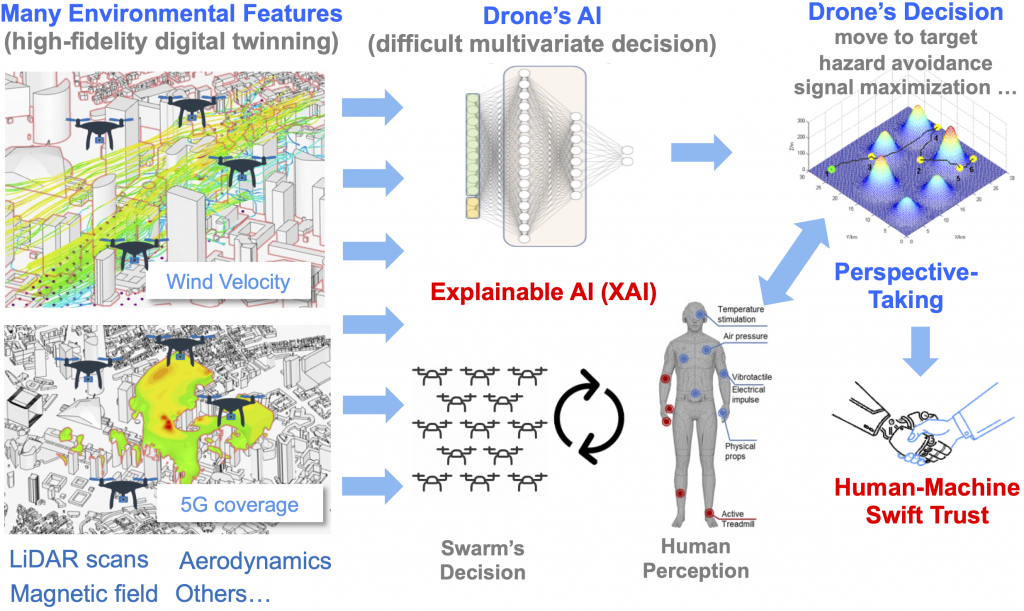
Students will actively contribute to the development and assessment of cutting-edge explainable AI (XAI) mechanisms specifically tailored for human-swarm interactions, decision rationale visualizations, including real-time behavior interpretation, and post-action feedback loops. These XAI methods aim to interpret the collective decision-making processes of drone swarms, ensuring their operations are both transparent and easily understood by human collaborators.
Leveraging both simulation tools and hands-on field experiments, the research will analyze the efficacy of these XAI methodologies in diverse operational conditions. Students will gain experience in employing state-of-the-art simulation platforms and will pilot drone swarms in real-world scenarios to validate our XAI techniques. Importantly, this project will also delve into the cognitive impacts of these interactions on human operators, evaluating the implications in trust, comprehension, and collaboration fostered by transparent swarm behaviors. Field testing will be primarily executed in the UF Autonomy Park, assessing drone-human synergy and the implications of XAI in dynamic environments.
Related federal project: AFOSR FA9550-22-1-0492: “Human-Machine Sensory Sharing for Swift Trust in Autonomy”
Thrust 5: Autonomous Rendezvous and Docking via Reinforcement Learning
Faculty lead: Fitz-Coy
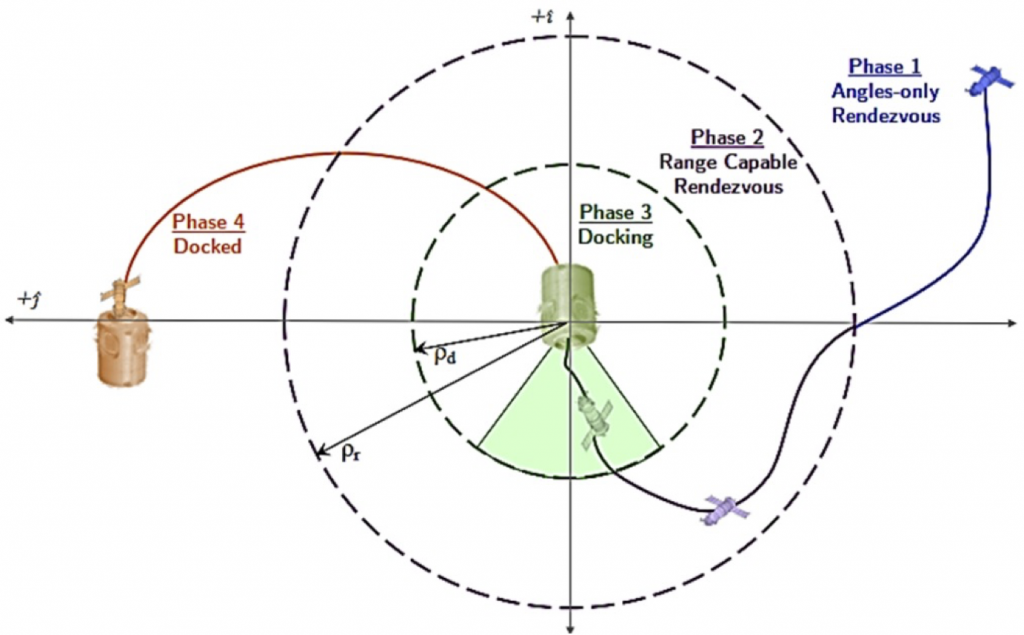
Students will contribute to the development of model-based reinforcement learning (MBRL) techniques to accomplish autonomous rendezvous, proximity operations, and docking in space systems. MBRL may offer advances in spacecraft autonomy that can advance space exploration and commercialization. One major issue limiting space ventures is space debris, and spacecraft autonomy can provide safe and effective solutions for orbital debris removal.
It can also provide a means for deeper space utilization/exploration, from Earth orbits to Cis-Lunar orbits, and even missions to Mars. The goal is to provide the means for close-proximity and time-sensitive maneuvers while outside the feasible reaches of ground communication capabilities. REU students working on this project will work on tasks such as optimizing RL training code (for instance, via multiprocessing, multithreading, and leveraging UF’s super computing capabilities) and exploring other reinforcement learning and/or neural network methodologies.
Related federal project: AFOSR Center of Excellence on Assured Autonomy in Contested Environments
Thrust 6: Robust Information Fusion for a Multi-Agent System with Heterogeneous Sensors
Faculty lead: Shin
Students will develop techniques for robust information fusion across heterogeneous sensors in autonomous systems. Using multiple, heterogeneous sensors has the potential to improve the robustness of autonomous systems to a variety of operating conditions and attacks. However, resolving conflicting information from diverse sensors is a challenging problem in information fusion that can leverage information on the estimated reliability of each sensor’s measurement, prior estimates and reports, and each sensor’s measurement model.
REU students working on this project will contribute to the development of information fusion approaches and implement and test these using autonomous vehicles operating in the UF Autonomy Park.
Thrust 7: Distributed Timing Estimation & Localization in GPS-denied Environments
Faculty leads: Wong, Shea

Students will contribute to the development and evaluation of distributed, collaborative timing estimation and localization algorithms that can achieve GPS-like timing and positioning accuracy for networks operating in GPS-denied environments. The algorithms estimate propagation delays between nodes in the network from timing measurements obtained from sounding packets broadcast by the nodes. With a careful modeling of the radio hardware, a stable enough but free-running clock on each node, and enough transmission bandwidth, GPS-level timing estimation accuracy (tens of nanoseconds) can be achieved.
REU students working on this project will learn about and utilize software-defined radios (SDRs) to implement and test distributed timing and localization algorithms to enable operation of autonomous systems in GPS-denied environments. Experimental evaluation on mobile platforms will be conducted using ground robots in the UF Autonomy Park, and the effect of jamming will be evaluated using SDRs mounted on UAVs.
Related federal project: ARL W911NF-20-2-0110: “Timing estimation in GPS-denied environment”
Thrust 8: Attack Surface Analysis for Autonomous Vehicle Software
Faculty lead: Yavuz
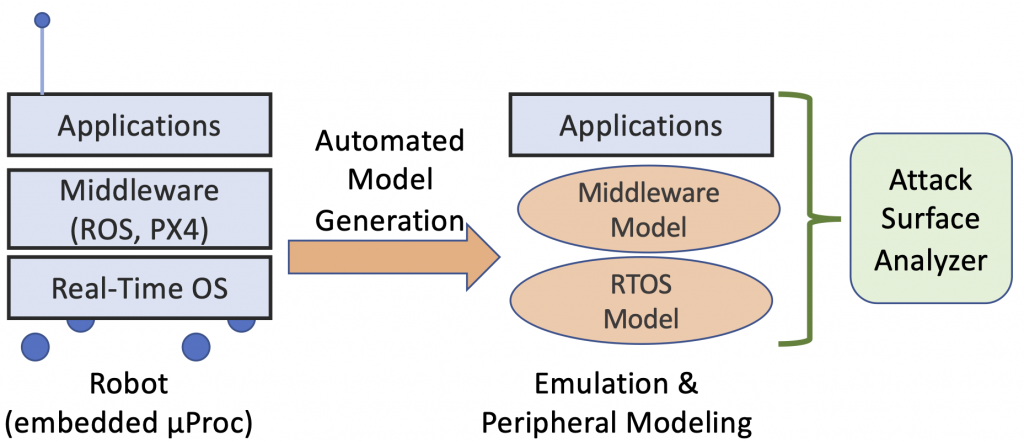
Students will contribute to research on making the software in autonomous vehicles robust to cyber attacks. Autonomous vehicles combine cyber and physical components and typically involve a complicated software stack that relies on multiple complex libraries, such as Robot Operating System (ROS) and PX4 Autopilot. Because of their complexity and multiple interfaces, such software stacks have a wide attack surface that should be carefully analyzed for vulnerabilities.
REU students will use model-guided analysis tools developed by Prof. Yavuz’s team to search for vulnerabilities in open source software for autonomous vehicles used in our Autonomy Park.
Related federal project: NSF CAREER Award CNS-1942235, “Towards a Secure and Reliable Internet of Things through Automated Model Extraction and Analysis”
Thrust 9: Assured, Real-time, Spacecraft Decision Making & Control
Faculty lead: Petersen
Students will bridge between computation and control by contributing to the creation of real-time maneuvering schemes for satellites. Currently satellites are limited by computationally limited processors (<200 MHz, < 1 MB of memory) and low-rate control loops (< 50 Hz). Even if methods are implementable, it is a large risk to use them without safety guarantees, convergence properties, and acceptance from the operator.
This project will push the boundaries of optimization, learning, and decision making to make methods realizable and implementable on satellites. Considerations include:
- Computation time necessary to run the methods
- Computational burden (memory, CPU usage)
- Robustness to navigation error and disturbances
- Safety
- Usability by an operator
The end goal is generate real-time code using a robotic testbed. REU students will experiment with and contribute to the development of state-of-the-arts methods, prototype the methods, and implement them in a digital simulation of satellites with an operator interface.
Related federal project: AFOSR Center of Excellence on Assured Autonomy in Contested Environments
Thrust 10: Evolutionary Neural Architecture Search for Autonomous Agents in Complex Environments
Faculty lead: Wang
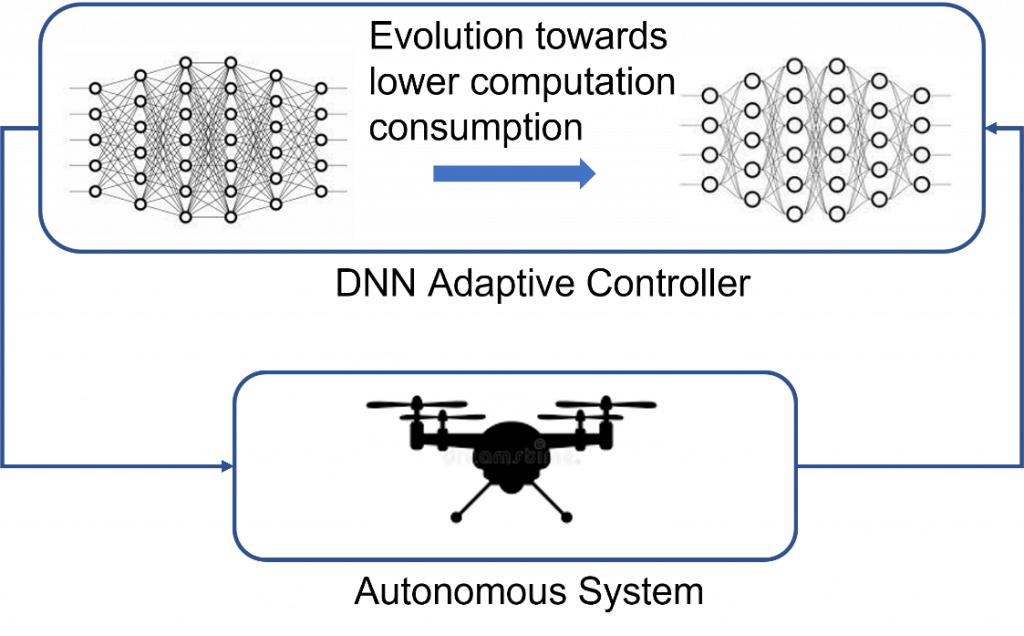
Students will contribute to the development of learning-based control algorithms for autonomous vehicles operating in uncertain (e.g., large environmental distance) or under adversarial attacks (e.g., corrupted sensors and actuators). Typical learning-based automatic planners/controllers implemented with deep neural networks (DNNs) incur heavy computational burdens on the onboard embedded computers and cause intolerable latency, memory overflow, energy consumption, etc. PI Wang’s research assures the real-time performance of learning-based planners/controllers.
He is currently developing computer algorithms to find computationally optimized neural network architectures that can fulfill the control using bounded computational resources by neural architecture search (NAS) based on evolutionary algorithms. REU students working on this project will first receive training on DNN-based adaptive control and NAS algorithms and tools. Then they will apply evolutionary NAS algorithms to optimize the DNN architecture for the the adaptive control of unmanned aerial/ground vehicles and evaluate the performance in our autonomy park.
Thrust 11: Exploring the Impact of Irrationality on Multi-Agent Safety
Faculty leads: Ruchkin, Fu
Students will contribute to research on ensuring safe operation in scenarios involving multiple agents, e.g., autonomous racing cars safely overtaking opponents. Game-theoretic techniques provide solutions in such scenarios, provided that all of the agents operate rationally and choose an action that maximizes their objective function. However, when this assumption is violated (e.g., by a distracted human or an autonomous agent with a software bug), the safety may be jeopardized.
This project will explore the relaxations (e.g., bounded or probabilistic rationality) and their effects on safety. The results of this project can help prioritize future research to detect agents that endanger safety by acting irrationally and mitigate the effects of their behavior. REU students working on this project will learn about game theory and contribute to the development of mathematical models of games and strategies with relaxed-rationality assumptions. Students will develop simulations of irrational behavior in autonomous racing and analyze the results.
Thrust 12: Physically Grounded World Modeling
Faculty lead: Ruchkin
World models predict future observations from high-dimensional sensor data (e.g., camera images). Such prediction is an increasingly critical capability to develop systems (e.g., to perform reinforcement learning for control). The learned latent representations inside world models often function as black boxes without a clear connection to the underlying physical states, which makes it difficult to debug world models or provide strong guarantees.
This project addresses a fundamental question: what does it take to make world models more physically grounded? In this project, REU students will help develop mechanisms of physical grounding for world models, in the form of connections to the dynamical models and precise links between sensor modalities (e.g., lidar and camera). Specifically, students will learn about generative video modeling, develop system-specific world models, train them on realistic data, and evaluate them on a variety of performance metrics.